Benchmark
Details are provided in the benchmark section. Here, we will only provide an overview.
There are six single-objective and four multi-objective functions available.
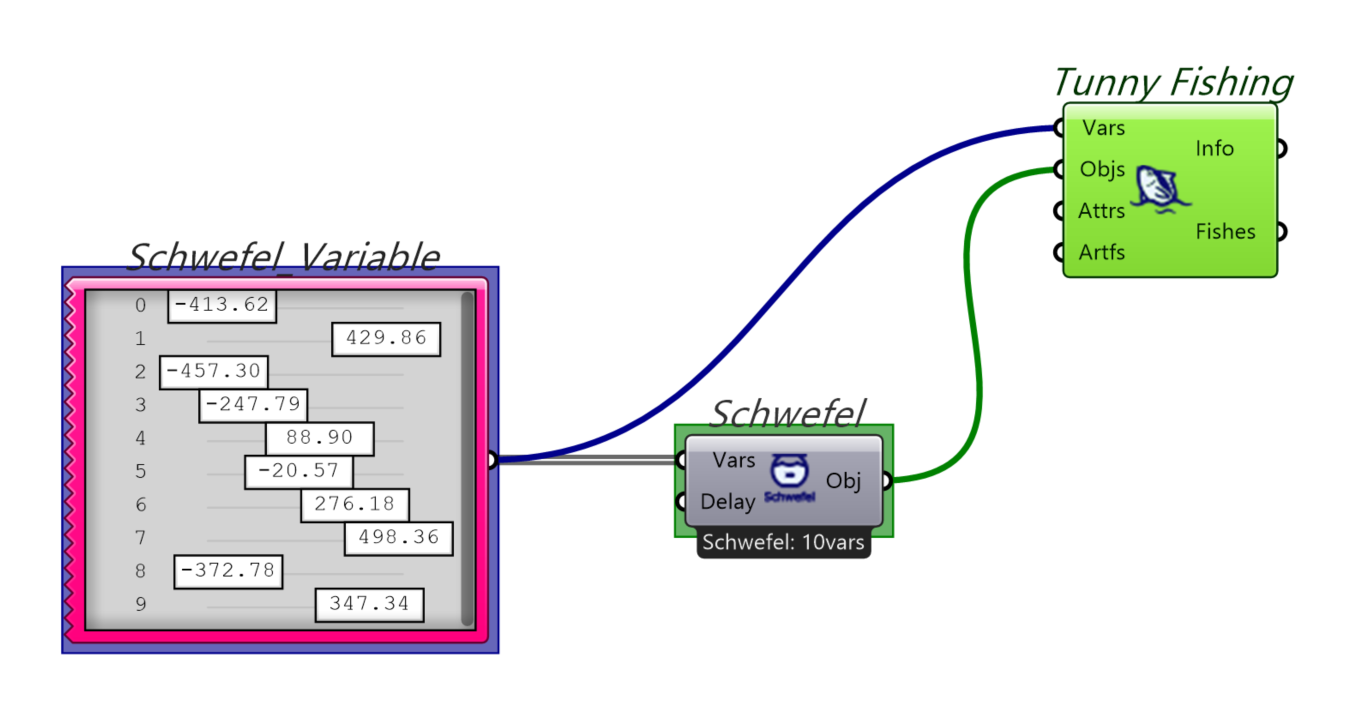
Once placed, the component connects to a GenePool with the appropriate range set
and connect to Vars input. The default is 10 variables, but the number of
variables can be any number.
Enter the number of seconds in the Delay input. The target function will take
the number of seconds entered to process. This is useful when you want to
simulate actual heavy analysis.
You can optimize benchmark functions by connecting to Tunny as follows.
Summary
Single-Objective Functions
| Name | Description | Optimal Value | Optimal Variables |
|---|---|---|---|
| Ackley | A multimodal function with many local minima and one global minimum at the origin. Features exponential and cosine components that create a complex landscape with a nearly flat outer region. | 0 | x* = (0, 0, ..., 0) |
| Griewank | A multimodal function that becomes more difficult as dimensionality increases. Has one global minimum at the origin and many local minima. The cosine component creates periodic structures. | 0 | x* = (0, 0, ..., 0) |
| Rastrigin | A highly multimodal function with many local minima arranged in a regular pattern. Based on the sphere function with added cosine modulation to create multiple peaks and valleys. | 0 | x* = (0, 0, ..., 0) |
| Rosenbrock | A classic optimization benchmark known as the "banana function" due to its curved valley shape. Non-convex with one global minimum in a narrow, curved valley that is difficult to locate. | 0 | x* = (1, 1, ..., 1) |
| Schwefel | A deceptive multimodal function where the global minimum is far from the local minima. Features a complex structure with the global optimum located near the boundary of the search space. | 0 | x* = (420.9687, 420.9687, ..., 420.9687) |
| Sphere | The simplest benchmark function with a single global minimum at the origin. Unimodal and convex, making it relatively easy to optimize and useful for testing basic algorithm performance. | 0 | x* = (0, 0, ..., 0) |
Multi-Objectives Functions
| Name | Description |
|---|---|
| DTLZ1 | A scalable multi-objective test problem with a linear Pareto front. Features a multi-modal landscape that becomes increasingly difficult as the number of objectives increases. The Pareto front forms a linear hyperplane. |
| DTLZ2 | A scalable multi-objective test problem with a spherical Pareto front. Simpler than DTLZ1 with a unimodal structure. The Pareto front forms a unit sphere in the objective space, making it useful for testing convergence. |
| ZDT1 | A two-objective test function with a convex Pareto front. Features a simple structure where one objective is the Sphere function and the other creates a convex trade-off. Widely used for algorithm comparison. |
| ZDT2 | A two-objective test function with a non-convex Pareto front. Similar to ZDT1 but with a concave Pareto front shape, making it more challenging for algorithms that assume convexity in the Pareto front. |